Codes
Click on the headings below to get the respective source code.
DESK dataset
The DESK dataset desciption along with the code for the surgeme recognition baselines on DESK dataset using Random forest and SVM.

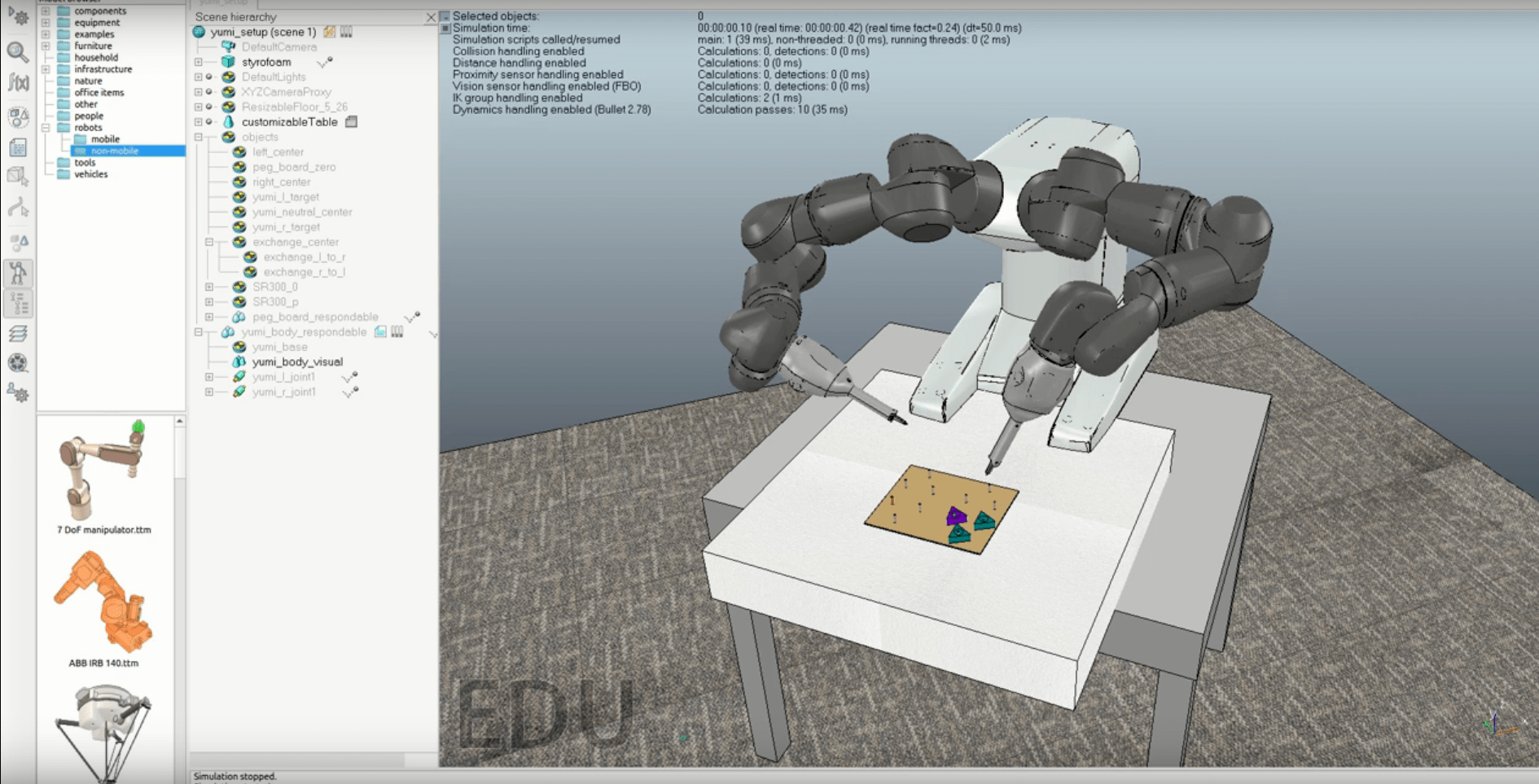
Yumi simulator for RL
A gym like environment designed for ABB Yumi Robot with surgical grippers. The simulation is done in VREP with pyrep for communication and updating simulation parameters.
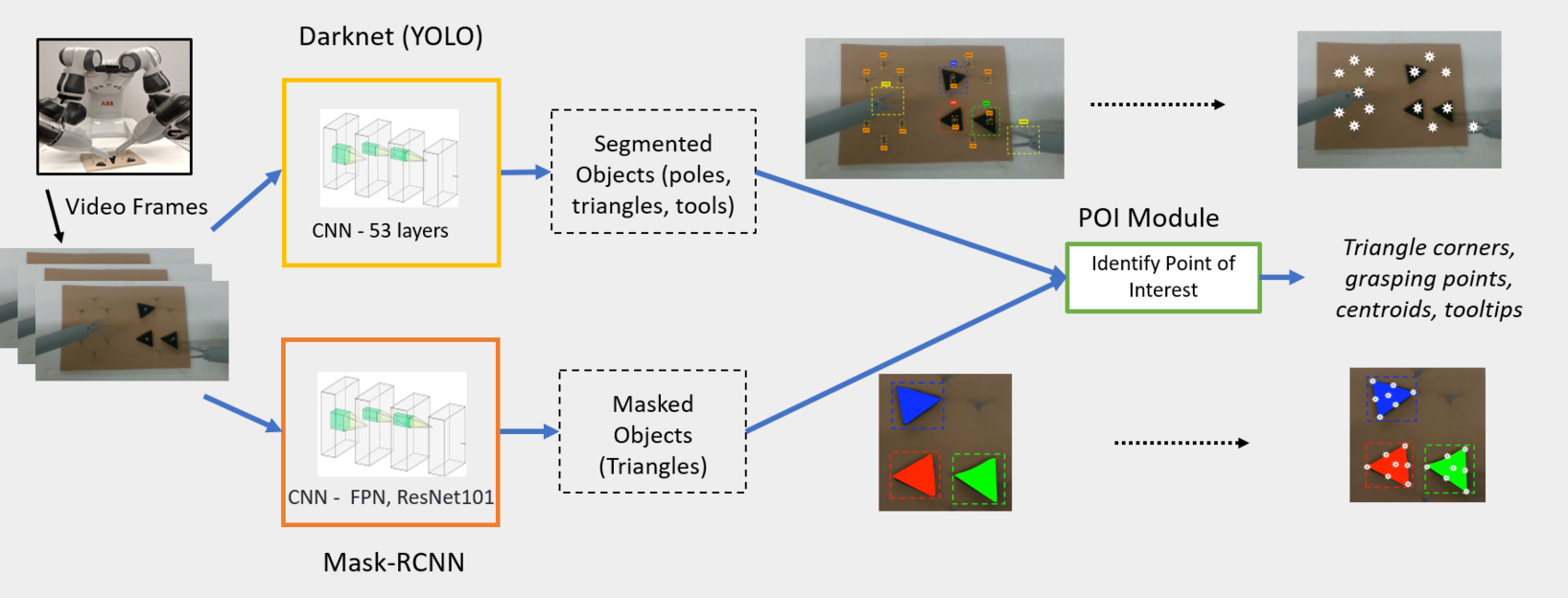
Object segmentation
The Mask RCNN utilities for obtaining object segmentations and publishing the masks over ROS.